Navigation notebook#
In this notebook, you will learn how to use the Unity ML-Agents environment for the first project of the Deep Reinforcement Learning Nanodegree.
1. Start the Environment#
We begin by importing some necessary packages. If the code cell below returns an error, please revisit the project instructions to double-check that you have installed Unity ML-Agents and NumPy.
# from unityagents import UnityEnvironment
import os
from mlagents_envs.environment import ActionTuple, BaseEnv
from mlagents_envs.registry import default_registry
from mlagents_envs.environment import UnityEnvironment
from mlagents_envs.side_channel.engine_configuration_channel import EngineConfigurationChannel
from mlagents_envs.side_channel.environment_parameters_channel import EnvironmentParametersChannel
import numpy as np
import matplotlib.pyplot as plt
from mpl_toolkits.axes_grid1 import ImageGrid, Grid
from matplotlib.animation import FuncAnimation
import matplotlib.animation as animation
import cv2
from IPython.display import display, HTML
trained = False # Didn't train yet.
Modifying the EngineConfiguration or EnvironmentParameters is possibile through side channels. Increasing the time_scale to speed up the training process is very useful.
time_scale = 5 # 20
# capture_frame_rate = 60
# target_frame_rate = 300
eng_channel = EngineConfigurationChannel()
params_channel = EnvironmentParametersChannel()
Next, we will start the environment! There are a few ways to do this
Run the Environment in Unity. This option provides the most flexibile user interaction and analytics experience. Execute the following cell and then press the “play” button in Unity.
Run the compiled environment with display output to observe the agent while training.
Run the headless compiled environment for the fastest training or on a cloud platform.
unity_env = UnityEnvironment(side_channels=[eng_channel, params_channel], seed=42)
Execute the following cell if you want to run a compiled environment. Before running the code cell below, change the exefile parameter to match the location of the Unity environment that you downloaded have built.
Show code cell source
import os.path
# exefile = '/home/joerg/repos/deep-reinforcement-learning/p1_navigation/FoodCollectorLinuxHeadless/foodCollectorHeadless.x86_64'
exefile = '/home/joerg/repos/deep-reinforcement-learning/p1_navigation/RayFoodCollectorLinuxHeadless/foodCollector.x86_64'
if os.path.isfile(exefile):
# env = UnityEnvironment(file_name="...")
unity_env = UnityEnvironment(
file_name=exefile,
side_channels=[eng_channel, params_channel], seed=42)
else:
print("File doesn't exist. Cannot start environment")
Apply the side channel configuration.
engine_config = {
"time_scale": time_scale,
#"capture_frame_rate": capture_frame_rate,
#"target_frame_rate": target_frame_rate
}
eng_channel.set_configuration_parameters(**engine_config)
The UnityToGymWrapper enables the straightforward usage of the code and concepts from Gym/Gymnasium.
from mlagents_envs.envs.unity_gym_env import UnityToGymWrapper
#gym_env = UnityToGymWrapper(env, uint8_visual, flatten_branched, allow_multiple_obs)
env = UnityToGymWrapper(unity_env, uint8_visual=False, flatten_branched=False, allow_multiple_obs=True)
Show code cell output
/home/joerg/miniforge3/envs/freshbanana/lib/python3.10/site-packages/gym/spaces/box.py:127: UserWarning: WARN: Box bound precision lowered by casting to float32
logger.warn(f"Box bound precision lowered by casting to {self.dtype}")
2. Examine the State and Action Spaces#
The simulation contains a single agent that navigates a large environment. At each time step, it has four discrete three continuous actions at its disposal, corresponding to the three degrees of freedom. These are then mapped to six discrete actions for this challenge:
0- walk right1- walk left2- turn left3- turn right4- walk forward5- walk backward
The state space has A reward of 37 dimensions and contains the agent’s velocity, along with ray-based perception of objects around agent’s forward direction.+1 is provided for collecting a yellow banana green marble, and a reward of -1 is provided for collecting a blue banana red marble.
Three sensors are used to train or to monitor the agent’s behavior, but only sensor 2 or 0 are used for training and inference.
2- Ray Perception Sensor 3D with 6 rays per direction and 3 (temporally) stacked raycasts.0- Camera Sensor, (64x64 RGB) mounted on top of the agent, with no frames stacked. In the DeepMind paper, four frames were stacked, enabling the convolutional layers to extract some temporal properties across those frames.1- Grid Sensor for basic monitoring (3x40x40) with the layers 1: good food, 2: walls, 3: bad food.
Run the code cell below to print some information about the environment.
# Run this cell for using the Ray Perception Sensor 3D
unity_sensor_id = 2
# Run this cell for using the Camera Sensor
unity_sensor_id = 0
Show code cell source
describe_actions_d = {
0: ' walk right -->',
1: '<-- walk left ',
2: '<-- turn left ',
3: ' turn right -->',
4: ' walk forward ',
5: ' walk backward ',
}
Show code cell source
env_info = env.reset()
action_size = env.action_size
print('Number of actions:', action_size)
print('Observation space: ', env.observation_space)
Number of actions: 3
Observation space: Tuple(Box(0.0, 1.0, (3, 64, 64), float32), Box(0.0, 1.0, (3, 40, 40), float32), Box(-inf, inf, (207,), float32))
3. Take Random Actions in the Environment#
In the next code cell, you will learn how to use the Python API to control the agent and receive feedback from the environment.
Once this cell is executed, you will watch the agent’s performance, if it selects an action (uniformly) at random with each time step. A window should pop up that allows you to observe the agent, as it moves through the environment.
Of course, as part of the project, you’ll have to change the code so that the agent is able to use its experience to gradually choose better actions when interacting with the environment!
It is always certainly a good idea to observe behavior and learning progress of the agent. This is achieved by plotting the agent’s First Person View (FPV) from the Camera Sensor and the Grid Sensor that provides a bird’s eye view of the surrounding area. This is particularly useful when the Unity environment is compiled in headless mode (without display output) when running and training in a cloud environment or for documentation and archiving the Jupyter notebook.
def rand_agent_gen(n=100):
env_info = env.reset()
score = 0
for i in range(n):
action_vec = np.random.rand(action_size)*2 - 1 # select a random action
action = 2
# action_vec = action_d[action] * 0.5
next_obs, rewards, done, info = env.step(action_vec) # send the action to the environment
score += rewards
yield next_obs, rewards, score, action
%%time
%%capture
# The "Random Agent" runs for n steps
results = list(rand_agent_gen(n=20))
frame_data = results[-1]
next_obs, rewards, score, action = frame_data
print("Score: {}".format(results[-1][2]))
A few helper functions are used for the visualization of the Agent’s observations and actions
visualize_output_funcshows a frame the Camera and Grid Sensor’s output. If the weights of the kernels of the first convolutional layer,w, are provided, they will be applied to the frame of the Camera Sensor.make_agent_clipcreates an animation from an iterable of the Agent’s states usingvisualize_output_func.
Show code cell source
def visualize_output_func(fig, w=None, normalize=True, count=True, nrows_ncols=(4, 4)):
step_count = 0
status_text_art = None
action_text_art = None
def visualize_output(frame_data):
nonlocal step_count
nonlocal status_text_art
nonlocal action_text_art
if count:
step_count = step_count + 1
next_obs, rewards, score, action = frame_data
status_text = 'Step {0:04d}\n\nScore {1:03d}'.format(step_count, int(score))
action_text = describe_actions_d[action]
next_cam_obs = next_obs[0]
next_grid_obs = next_obs[1]
if w is not None:
batch_size = w.shape[0]
grid = ImageGrid(fig, 122, nrows_ncols=nrows_ncols, axes_pad = 0.1)
filtered_images_cv = apply_kernels_to_image(next_cam_obs, weigths_conv1)
for i in range(batch_size):
image = filtered_images_cv[i]
image = np.transpose(image, (1, 2, 0)) # transpose to go from torch to numpy image
if normalize:
mean = np.array([0.485, 0.456, 0.406])
std = np.array([0.229, 0.224, 0.225])
image = std * image + mean
image = np.clip(image, 0, 1)
grid[i].clear()
grid[i].imshow(image, cmap='gray')
grid[i].get_xaxis().set_ticks([])
grid[i].get_yaxis().set_ticks([])
plt.axis('off')
grid = Grid(fig, 121, nrows_ncols=(2,2), axes_pad=0.1, share_x=False)
fpv_view_id = 1
grid_view_id = 3
# Remove axis ticks
grid[0].clear()
grid[2].clear()
grid[0].get_xaxis().set_ticks([])
grid[0].get_yaxis().set_ticks([])
grid[0].axis('off')
grid[2].get_xaxis().set_ticks([])
grid[2].get_yaxis().set_ticks([])
grid[2].axis('off')
grid[0].set_xlim((0,40))
grid[2].set_xlim((0,40))
if action_text_art is not None:
action_text_art.remove()
action_text_art = grid[0].text(
20, 20, action_text,
fontsize=10, fontweight='bold', rotation=0, family='monospace', horizontalalignment = 'center')
if status_text_art is not None:
status_text_art.remove()
status_text_art = grid[2].text(
20, 20,
status_text,
fontsize=14, fontweight='bold', rotation=0, family='monospace', horizontalalignment = 'center')
else: # Display game only
grid = Grid(fig, 111, nrows_ncols=(1,2), axes_pad=0.15, share_x=False, share_y=False)
fig.suptitle(action_text + ' Step {0:04d} Score {1:03d}'.format(
step_count, int(score)), fontsize=14, fontweight='bold', family='monospace')
fpv_view_id = 0
grid_view_id = 1
grid.axes_all[0].set_title(action_text)
# Camera sensor FPV
next_cam_pic = next_cam_obs.transpose((1, 2, 0))
grid[fpv_view_id].clear()
grid[fpv_view_id].imshow(next_cam_pic)
plt.axis('off')
next_grid_pic = next_grid_obs.copy()
grid[grid_view_id].clear()
walls = next_grid_pic[1].copy()
next_grid_pic[1] = next_grid_pic[0]
next_grid_pic[0] = np.zeros((40,40))
next_grid_pic[0] = next_grid_pic[2]
next_grid_pic[2] = np.zeros((40,40))
next_grid_pic[2] = walls
next_grid_pic = next_grid_pic.transpose((1,2,0))
next_grid_pic = np.flipud(next_grid_pic)
next_grid_pic = np.rot90(next_grid_pic)
# indicate the position of the agent at the center
next_grid_pic[20,20,0] = 200
next_grid_pic[20,20,1] = 200
next_grid_pic[20,20,2] = 255
grid[grid_view_id].imshow(next_grid_pic)
grid[fpv_view_id].get_xaxis().set_ticks([])
grid[fpv_view_id].get_yaxis().set_ticks([])
grid[grid_view_id].get_xaxis().set_ticks([])
grid[grid_view_id].get_yaxis().set_ticks([])
plt.axis('off')
#plt.show()
return visualize_output
def apply_kernels_to_image(image, w):
"""
Apply the kernels w (channels, width, height) to the image using cv2.filter2D for each channel.
"""
filtered_image = image.copy() # .data.cpu().clone().numpy() # convert to numpy array from a Tensor
#filtered_image = cv2.cvtColor(filtered_image, cv2.COLOR_BGR2RGB)
n_image_channels, width_image, height_image = filtered_image.shape
n_kernels, n_kernel_channels = w.shape[0], w.shape[1]
assert n_kernel_channels == n_image_channels, "The number of image channels and kernel channels must match"
n_channels = n_kernel_channels
# filtered_image = np.transpose(filtered_image, (1, 2, 0)) # transpose to go from torch to numpy image
filtered_images = np.zeros((n_kernels, n_channels, width_image, height_image))
for kernel_num in range(n_kernels):
image_copy = filtered_image.copy()
for channel_num in range(n_channels): # Apply kernels to each color channel
filtered_images[kernel_num][channel_num] = cv2.filter2D(image_copy[channel_num], -1, w[kernel_num][channel_num])
return filtered_images
# return torch.FloatTensor(filtered_images)
def make_agent_clip(frames, w=None, normalize=True, nrows_ncols=(4, 4)):
fig = plt.figure(figsize=(8,4))
count = 0
visualize = visualize_output_func(fig, w=w, normalize=normalize, nrows_ncols=nrows_ncols)
anim = FuncAnimation(fig, visualize, interval=100, frames=frames, repeat=True)
return anim
Show code cell source
%%time
%%capture
# Create a video clip to observe the agent.
game_clip1 = make_agent_clip(results).to_html5_video()
HTML(game_clip1)
When finished, you can close the environment.
env.close()
4. Train the Agent!#
The example solution of the LunarLander Gym environment is adapted for solving the Banana Collector. The Agent is first trained using the Ray Perception Sensor and then using the Camera Sensor only.
For the Ray Perception Sensor, the QNetwork with three fully connected linear layers and ReLu activation functions was adapted to the dimension of the observation and the action space.
For using the Camera Sensor, CNN’s, are added beforehand the fully connected “descision layer”, inspired by this solution that was based on the DeepMind paper. The camera sensor has a view angle of 85 deg and a resolution of 64x64 RGB. Two architectures that are work with a smaller resolution of 40x40 are left here for reference.
# model.py
import torch
import torch.nn as nn
import torch.nn.functional as F
class QNetwork_FC1(nn.Module):
"""Actor (Policy) Model."""
def __init__(self, state_size, action_size, seed, fc1_units=300, fc2_units=200): # 64, 64
"""Initialize parameters and build model.
Params
======
state_size (int): Dimension of each state
action_size (int): Dimension of each action
seed (int): Random seed
fc1_units (int): Number of nodes in first hidden layer
fc2_units (int): Number of nodes in second hidden layer
"""
super(QNetwork, self).__init__()
self.seed = torch.manual_seed(seed)
self.fc1 = nn.Linear(state_size, fc1_units)
self.fc2 = nn.Linear(fc1_units, fc2_units)
self.fc3 = nn.Linear(fc2_units, action_size)
def forward(self, state):
"""Build a network that maps state -> action values."""
x = F.relu(self.fc1(state))
x = F.relu(self.fc2(x))
return self.fc3(x)
Show code cell source
class QConvNetwork40(nn.Module):
# Camera, Field of view: 70, Resolution 40x40
# This works good and is left for reference or later usage.
def __init__(self, state_size, action_size, seed, fc1_units=128, fc2_units=128):
super(QConvNetwork40, self).__init__()
# 3 input (image) channels (RGB) or (good, walls, bad), 16 output channels/feature maps, 9x9 square convolution kernel
## output size = (W-F)/S +1 = (40-9)/1 +1 = 32
# the output Tensor for one image, will have the dimensions: (16, 8, 8)
self.conv1 = nn.Conv2d(3, 16, 9)
# maxpool layer
# pool with kernel_size=4, stride=4
self.pool1 = nn.MaxPool2d(4, 4)
# second conv layer: 16 inputs, 32 outputs, 5x5 conv
## output size = (W-F)/S +1 = (8-5)/1 +1 = 4
# the output tensor will have dimensions: (32, 4, 4)
# after another pool layer this becomes (32, 2, 2)
self.conv2 = nn.Conv2d(16, 32, 5)
# maxpool layer
# pool with kernel_size=2, stride=2
self.pool2 = nn.MaxPool2d(2, 2)
self.fc1 = nn.Linear(32*2*2, fc1_units)
self.fc2 = nn.Linear(fc1_units, fc2_units)
self.fc3 = nn.Linear(fc2_units, action_size)
def forward(self, x):
# two conv/relu + pool layers
x = self.pool1(F.relu(self.conv1(x)))
x = self.pool2(F.relu(self.conv2(x)))
# x = self.pool(F.elu(self.conv3(x)))
# three linear layers with dropout in between
#print(x.shape)
x = x.view(x.size(0), -1)
x = F.relu(self.fc1(x))
#x = self.fc1_drop(x)
x = F.relu(self.fc2(x))
x = self.fc3(x)
# a modified x, having gone through all the layers of your model, should be returned
return x
## Note that among the layers to add, consider including:
# maxpooling layers, multiple conv layers, fully-connected layers, and other layers (such as dropout or batch normalization) to avoid overfitting
# https://github.com/tjwhitaker/human-level-control-through-deep-reinforcement-learning/blob/master/src/model.py
class DQN40_HLC_paper(nn.Module):
def __init__(self, state_size, action_size, seed, fc1_units=128, fc2_units=128):
super(DQN40_HLC_paper, self).__init__()
## output size = (W-F)/S +1 = (40-5)/1 +1 = 36
# the output Tensor for one image, will have the dimensions: (16, 16, 16)
self.conv1 = nn.Conv2d(3, 16, kernel_size=3, stride=2) # kernel_size=5
self.bn1 = nn.BatchNorm2d(16)
## output size = (W-F)/S +1 = (16-5)/1 +1 = 12
# the output Tensor for one image, will have the dimensions: (32, 6, 6)
self.conv2 = nn.Conv2d(16, 32, kernel_size=3, stride=2)
self.bn2 = nn.BatchNorm2d(32)
## output size = (W-F)/S +1 = (6-5)/1 +1 = 2
# the output Tensor for one image, will have the dimensions: (32, 2, 2)
self.conv3 = nn.Conv2d(32, 32, kernel_size=3, stride=2)
self.bn3 = nn.BatchNorm2d(32)
self.head = nn.Linear(512, action_size)
def forward(self, x):
x = F.relu(self.bn1(self.conv1(x)))
x = F.relu(self.bn2(self.conv2(x)))
x = F.relu(self.bn3(self.conv3(x)))
return self.head(x.view(x.size(0), -1))
class DQN64_HLC_paper(nn.Module):
def __init__(self, state_size, action_size, seed, fc1_units=128, fc2_units=128):
super(DQN64_HLC_paper, self).__init__()
self.conv1 = nn.Conv2d(3, 16, kernel_size=7, stride=2) # kernel_size=5
self.bn1 = nn.BatchNorm2d(16)
self.conv2 = nn.Conv2d(16, 32, kernel_size=7, stride=2)
self.bn2 = nn.BatchNorm2d(32)
self.conv3 = nn.Conv2d(32, 32, kernel_size=7, stride=2)
self.bn3 = nn.BatchNorm2d(32)
self.head = nn.Linear(288, action_size)
def forward(self, x):
x = F.relu(self.bn1(self.conv1(x)))
x = F.relu(self.bn2(self.conv2(x)))
x = F.relu(self.bn3(self.conv3(x)))
return self.head(x.view(x.size(0), -1))
class DQN64_HLC_paper_Mod1(nn.Module):
def __init__(self, state_size, action_size, seed, fc1_units=144):
super(DQN64_HLC_paper_Mod1, self).__init__()
self.conv1 = nn.Conv2d(3, 16, kernel_size=7, stride=2)
self.bn1 = nn.BatchNorm2d(16)
self.conv2 = nn.Conv2d(16, 32, kernel_size=7, stride=2)
self.bn2 = nn.BatchNorm2d(32)
self.conv3 = nn.Conv2d(32, 32, kernel_size=7, stride=2)
self.bn3 = nn.BatchNorm2d(32)
self.fc1 = nn.Linear(288, fc1_units)
self.fc2 = nn.Linear(fc1_units, action_size)
def forward(self, x):
x = F.relu(self.bn1(self.conv1(x)))
x = F.relu(self.bn2(self.conv2(x)))
x = F.relu(self.bn3(self.conv3(x)))
x = x.view(x.size(0), -1)
x = F.relu(self.fc1(x))
x = self.fc2(x)
return x
The Deep Q-Learning algorithm currently consist of a
continuous observation space and a
discrete action space
and currently implements
Experience Replay in the
class ReplayBufferFixed Q-Targets in the method
learnofclass Agent
as described in the paper “Human-level control through deep reinforcement learning” from Google DeepMind.
Show code cell source
# dqn_agent.py
import numpy as np
import random
from collections import namedtuple, deque
#from model import QNetwork
import torch
import torch.nn.functional as F
import torch.optim as optim
BUFFER_SIZE = int(1e5) # replay buffer size
BATCH_SIZE = 64 # minibatch size
GAMMA = 0.99 # discount factor
TAU = 1e-3 # for soft update of target parameters
LR = 5e-4 # learning rate
UPDATE_EVERY = 8 # how often to update the network
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
action_d = {
0: np.array([0, 1,0], dtype='float'), # walk forward
1: np.array([0,-1,0], dtype='float'), # walk backward
2: np.array([0,0, 1], dtype='float'), # turn right
3: np.array([0,0,-1], dtype='float'), # turn left
4: np.array([ 1,0,0], dtype='float'), # walk right
5: np.array([-1,0,0], dtype='float'), # walk left
}
class Agent():
"""Interacts with and learns from the environment."""
def __init__(self, state_size, action_size, seed):
"""Initialize an Agent object.
Params
======
state_size (int): dimension of each state
action_size (int): dimension of each action
seed (int): random seed
"""
self.state_size = state_size
self.action_size = action_size
self.seed = random.seed(seed)
# Q-Network
self.qnetwork_local = QNetwork(state_size, action_size, seed).to(device)
self.qnetwork_target = QNetwork(state_size, action_size, seed).to(device)
self.optimizer = optim.Adam(self.qnetwork_local.parameters(), lr=LR)
# Replay memory
self.memory = ReplayBuffer(action_size, BUFFER_SIZE, BATCH_SIZE, seed)
# Initialize time step (for updating every UPDATE_EVERY steps)
self.t_step = 0
def step(self, state, action, reward, next_state, done):
# Save experience in replay memory
self.memory.add(state, action, reward, next_state, done)
# Learn every UPDATE_EVERY time steps.
self.t_step = (self.t_step + 1) % UPDATE_EVERY
if self.t_step == 0:
# If enough samples are available in memory, get random subset and learn
if len(self.memory) > BATCH_SIZE:
experiences = self.memory.sample()
self.learn(experiences, GAMMA)
def act(self, state, eps=0.):
"""Returns actions for given state as per current policy.
Params
======
state (array_like): current state
eps (float): epsilon, for epsilon-greedy action selection
"""
state = torch.from_numpy(state).float().unsqueeze(0).to(device)
self.qnetwork_local.eval()
with torch.no_grad():
action_values = self.qnetwork_local(state)
self.qnetwork_local.train()
# Epsilon-greedy action selection
if random.random() > eps:
return np.argmax(action_values.cpu().data.numpy())
else:
return random.randint(0, self.action_size-1)
# return random.choice(np.arange(self.action_size))
def learn(self, experiences, gamma):
"""Update value parameters using given batch of experience tuples.
Params
======
experiences (Tuple[torch.Tensor]): tuple of (s, a, r, s', done) tuples
gamma (float): discount factor
"""
states, actions, rewards, next_states, dones = experiences
# Get max predicted Q values (for next states) from target model
Q_targets_next = self.qnetwork_target(next_states).detach().max(1)[0].unsqueeze(1)
# Compute Q targets for current states
Q_targets = rewards + (gamma * Q_targets_next * (1 - dones))
# Get expected Q values from local model
Q_expected = self.qnetwork_local(states).gather(1, actions)
# Compute loss
loss = F.mse_loss(Q_expected, Q_targets)
# Minimize the loss
self.optimizer.zero_grad()
loss.backward()
self.optimizer.step()
# ------------------- update target network ------------------- #
self.soft_update(self.qnetwork_local, self.qnetwork_target, TAU)
def soft_update(self, local_model, target_model, tau):
"""Soft update model parameters.
θ_target = τ*θ_local + (1 - τ)*θ_target
Params
======
local_model (PyTorch model): weights will be copied from
target_model (PyTorch model): weights will be copied to
tau (float): interpolation parameter
"""
for target_param, local_param in zip(target_model.parameters(), local_model.parameters()):
target_param.data.copy_(tau*local_param.data + (1.0-tau)*target_param.data)
# states_ReplayBuffer = None
class ReplayBuffer:
"""Fixed-size buffer to store experience tuples."""
def __init__(self, action_size, buffer_size, batch_size, seed):
"""Initialize a ReplayBuffer object.
Params
======
action_size (int): dimension of each action
buffer_size (int): maximum size of buffer
batch_size (int): size of each training batch
seed (int): random seed
"""
self.action_size = action_size
self.memory = deque(maxlen=buffer_size)
self.batch_size = batch_size
self.experience = namedtuple("Experience", field_names=["state", "action", "reward", "next_state", "done"])
self.seed = random.seed(seed)
def add(self, state, action, reward, next_state, done):
"""Add a new experience to memory."""
e = self.experience(state, action, reward, next_state, done)
self.memory.append(e)
def sample(self):
"""Randomly sample a batch of experiences from memory."""
experiences = random.sample(self.memory, k=self.batch_size)
# global states_ReplayBuffer
# states_ReplayBuffer = [e.state for e in experiences if e is not None]
states = torch.from_numpy(np.stack([e.state for e in experiences if e is not None])).float().to(device) # stack was vstack
actions = torch.from_numpy(np.vstack([e.action for e in experiences if e is not None])).long().to(device)
rewards = torch.from_numpy(np.vstack([e.reward for e in experiences if e is not None])).float().to(device)
next_states = torch.from_numpy(np.stack([e.next_state for e in experiences if e is not None])).float().to(device)
dones = torch.from_numpy(np.vstack([e.done for e in experiences if e is not None]).astype(np.uint8)).float().to(device)
return (states, actions, rewards, next_states, dones)
def __len__(self):
"""Return the current size of internal memory."""
return len(self.memory)
The model network architecture is currently selected depending on the desired Sensor only. This could be improved for a more exhaustive study.
Show code cell source
# Run this cell to setup the agent for the Ray Perception Sensor
if unity_sensor_id == 2: # Ray Perception Sensor
QNetwork = QNetwork_FC1
agent = Agent(state_size=207, action_size=6, seed=42)
elif unity_sensor_id == 0: # Camera Sensor
# QNetwork = QConvNetwork40
# QNetwork = QConvNetwork64
# QNetwork = DQN40_HLC_paper
# QNetwork = DQN64_HLC_paper # The agent gets stuck frequently or oszillates.
QNetwork = DQN64_HLC_paper_Mod1 # Best looking behavior
agent = Agent(state_size=0, action_size=6, seed=42)
else:
raise ValueError("unity_sensor_id must be 0 or 2.")
The generator agent_gen returns at each inference or learning step of an episode until n steps are reached or the episode is done.
Show code cell source
# from dqn_agent import Agent
def agent_gen(learn=False, n=100, eps=0., sensor_id=0):
"""
Generator to execute a learning and/or decision step for n steps.
"""
obs = env.reset()
score = 0
for i in range(n):
action = agent.act(obs[sensor_id], eps)
next_obs, rewards, done, info = env.step(action_d[action]) # send the action to the environment
if learn:
agent.step(obs[sensor_id], action, rewards, next_obs[sensor_id], done)
obs = next_obs
score += rewards
if done:
break
yield next_obs, rewards, score, action
Testing the untrained agent through the generator agent_gen for a few steps will fail quickly, in case the model architecture or the interfaces to the DQN algorithm are inconsistent.
Show code cell source
%%time
#%%capture
# The "Untrained Agent" runs for n steps. Can be used to check to network/model architecture.
results_untrained = list(agent_gen(n=30, sensor_id=unity_sensor_id))
Show code cell output
CPU times: user 1.33 s, sys: 712 ms, total: 2.04 s
Wall time: 2.66 s
Furthermore, some helper functions are needed for saving and loading trained models and some statistics for performance assessment.
Show code cell source
import pickle
def save_trained_nn(nn, scores=None, episode=None, results=None, export_onnx=True, dummy_input=None):
"""Save a trained network. The filename corresponds to the class name"""
name = nn.__class__.__name__
if episode is None:
saved_models_path = 'saved_models'
episode_suffix = ''
else:
saved_models_path = 'temporary_checkpoints'
episode_suffix = '__' + str(episode)
torch.save(nn.state_dict(), os.path.join(saved_models_path, name+episode_suffix+'.pth'))
if scores is not None:
np.save(os.path.join(
saved_models_path, name+episode_suffix+'.scores.npy'), np.array(scores), allow_pickle=False, fix_imports=True)
if results is not None:
with open(os.path.join(saved_models_path, name+episode_suffix+'.results.pickle.dump'), 'wb') as pickle_dump_file:
pickle.dump(results, pickle_dump_file)
if export_onnx:
dummy_input_on_device = torch.from_numpy(dummy_input).float().unsqueeze(0).to(device)
torch.onnx.export(
nn,
dummy_input_on_device, # model input (or a tuple for multiple inputs)
os.path.join(saved_models_path, name+episode_suffix+'.onnx'),
export_params=True, # store the trained parameter weights inside the model file
opset_version=10, # the ONNX version to export the model to
do_constant_folding=True, # whether to execute constant folding for optimization
input_names=['vector_observation'], # the model's input name
output_names=['continuous_actions'], # the model's output names
dynamic_axes={'vector_observation': {0: 'batch_size'}, # dynamic axis for the input tensor
'continuous_actions': {0: 'batch_size'}}
)
def load_trained_nn(nn):
name = nn.__class__.__name__
nn.load_state_dict(torch.load(os.path.join('saved_models', name+'.pth')))
nn.eval()
def load_dump(nn):
name = nn.__class__.__name__
with open(os.path.join('saved_models', name+'.results.pickle.dump'), 'rb') as pickle_file:
content = pickle.load(pickle_file)
return content
# results = load_dump(agent.qnetwork_local)
Now, everything is prepared to start the training. This will take a while, because the time_scale of the Unity environment cannot be increased to very high numbers. A time scale of 20 worked fine for the training when using the compiled a headless environment. A smaller time scale of ~5 is a good choice for observing the agent while training.
Show code cell source
%%time
results = list()
def dqn(sensor_id=2, n_episodes=2000, max_t=1500, eps_start=1.0, eps_end=0.01, eps_decay=0.995, print_every=100, save_every=None):
"""Deep Q-Learning.
Params
======
n_episodes (int): maximum number of training episodes
max_t (int): maximum number of timesteps per episode
eps_start (float): starting value of epsilon, for epsilon-greedy action selection
eps_end (float): minimum value of epsilon
eps_decay (float): multiplicative factor (per episode) for decreasing epsilon
"""
global results
scores = [] # list containing scores from each episode
scores_window = deque(maxlen=print_every) # last "print_every" scores
eps = eps_start # initialize epsilon
for i_episode in range(1, n_episodes+1):
results = list(agent_gen(learn=True, n=max_t, eps=eps, sensor_id=sensor_id))
score = results[-1][2]
scores_window.append(score) # save most recent score
scores.append(score) # save most recent score
eps = max(eps_end, eps_decay*eps) # decrease epsilon
print('\rEpisode {}\tAverage Score: {:.2f}'.format(i_episode, np.mean(scores_window)), end="")
if i_episode % print_every == 0:
print('\rEpisode {}\tAverage Score: {:.2f}'.format(i_episode, np.mean(scores_window)))
if save_every is not None:
if i_episode % save_every == 0:
save_trained_nn(agent.qnetwork_local, scores=scores, episode=i_episode, export_onnx=False)
if np.mean(scores_window)>=100.0:
print('\nEnvironment solved in {:d} episodes!\tAverage Score: {:.2f}'.format(i_episode-print_every, np.mean(scores_window)))
torch.save(agent.qnetwork_local.state_dict(), 'checkpoint.pth')
break
return scores
# sensor_id 0: Camera Sensor, 1: Grid Sensor, 2: Ray Perception Sensor 3D
if unity_sensor_id == 2:
scores = dqn(n_episodes=2000, sensor_id=unity_sensor_id, save_every=10)
if unity_sensor_id == 0:
BUFFER_SIZE = int(2e5) # replay buffer size
BATCH_SIZE = 128 # minibatch size
GAMMA = 0.995 # discount factor
TAU = 1.25e-3 # for soft update of target parameters
LR = 8e-4 # learning rate: 8e-4 worked
UPDATE_EVERY = 10 # how often to update the network
scores = dqn(n_episodes=2000, sensor_id=unity_sensor_id, save_every=10, eps_decay=0.9973)
trained = True
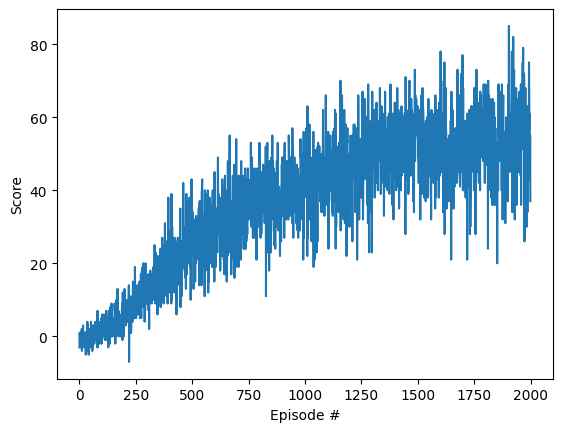
# plot the scores
fig = plt.figure()
ax = fig.add_subplot(111)
plt.plot(np.arange(len(scores)), scores)
plt.ylabel('Score')
plt.xlabel('Episode #')
plt.show()
Show code cell output
Episode 100 Average Score: 0.18
Episode 200 Average Score: 3.51
Episode 300 Average Score: 9.24
Episode 400 Average Score: 16.28
Episode 500 Average Score: 22.70
Episode 600 Average Score: 27.56
Episode 700 Average Score: 30.63
Episode 800 Average Score: 35.85
Episode 900 Average Score: 37.42
Episode 1000 Average Score: 40.95
Episode 1100 Average Score: 43.00
Episode 1200 Average Score: 44.86
Episode 1300 Average Score: 47.71
Episode 1400 Average Score: 51.43
Episode 1500 Average Score: 53.94
Episode 1600 Average Score: 50.98
Episode 1700 Average Score: 51.12
Episode 1800 Average Score: 52.64
Episode 1900 Average Score: 51.30
Episode 2000 Average Score: 56.43
CPU times: user 4h 22min 6s, sys: 22min 50s, total: 4h 44min 57s
Wall time: 12h 3min 18s
Show code cell content
# Try continuing the training...
# more_scores = dqn(n_episodes=5, eps_start=0.02, sensor_id=unity_sensor_id, eps_decay=0.997)
Finally save the trained model parameters or load the parameters of a previously trained model for further analysis or application.
Show code cell source
# Save model. WARNING: An existing model will be overwritten
if trained:
save_trained_nn(agent.qnetwork_local, scores=scores, results=results, dummy_input=results[0][0][unity_sensor_id])
else:
print("Didn't save, because the model was not trained yet.")
Show code cell source
# Load trained model
if not trained:
load_trained_nn(agent.qnetwork_local)
5. Results#
The achieved score after passing x episodes of training for each model is shown in the following picture.
It’s not a surprise that the best score is achieved when using the Ray Perception Sensor with the simple QNetwork_FC1. The Agent learns fast and is definitely demonstrating a “better than human” performance.
When using the Camera Sensor with a low resolution of 40x40 RGB, the training just works with QConvNetwork40 and DQN40_HLC_paper with a moderate performance given the fact that the image resolution is really poor.
When using the Camera Sensor with an increased resolution of 64x64 RGB, DQN64_HLC_paper_Mod1 reaches a better score too. Interestingly there is no learning progress when applying the previously working hyperparameters. So LR (learning rate), GAMMA (discount factor), BUFFER_SIZE and BATCH_SIZE are all increased, to learn faster, longer and from more collected experience.
Show code cell source
import scipy.signal
def lowpass(data: np.ndarray, cutoff: float, sample_rate: float, poles: int = 5):
sos = scipy.signal.butter(poles, cutoff, 'lowpass', fs=sample_rate, output='sos')
filtered_data = scipy.signal.sosfiltfilt(sos, data)
return filtered_data
def load_scores(path):
scores_d = {}
for filename in os.listdir(path):
if filename.endswith('.scores.npy'):
model_name = filename.split('.scores.npy')[0]
scores_d[model_name] = np.load(os.path.join(path, filename))
return scores_d
# Load the scores
scores_d = load_scores('saved_models')
fig = plt.figure()
ax = fig.add_subplot(111)
sample_rate = 1.0
times = np.arange(len(scores))/sample_rate
line_list = []
for k in scores_d.keys():
scores = scores_d[k]
ax.plot(np.arange(len(scores)), scores, alpha=0.25)
line_list.append((k, ax.get_lines()[-1].get_color()))
for k, c in line_list:
scores = scores_d[k]
filtered = lowpass(scores, 0.004, sample_rate)
ax.plot(np.arange(len(filtered)), filtered, color=c, label=k)
ax.set_xlabel("Episode")
ax.set_ylabel("Score")
ax.legend()
ax.grid()
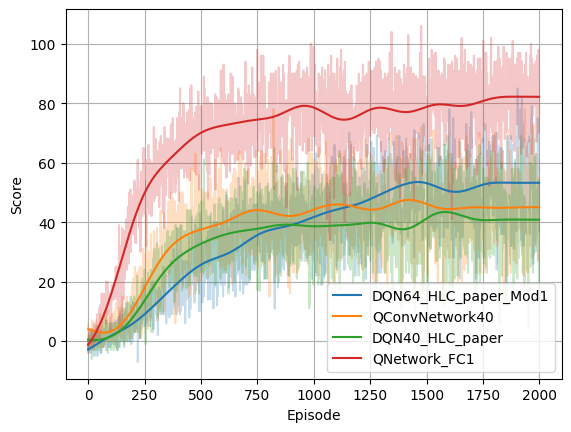
Results from more model architectures and more enhanced Deep-Q Learning algorithms might be added here :-)
6. Watching the Agent#
Simply watching the Agent to play provides a good impression whether the learnt policy is good or bad.
Show code cell source
%%time
#%%capture
# The "trained Agent" runs for n steps
results_trained = list(agent_gen(n=100, sensor_id=unity_sensor_id))
Show code cell output
CPU times: user 422 ms, sys: 43.6 ms, total: 465 ms
Wall time: 1.51 s
6.1 Using the Ray Perception Sensor#
The trained Agent using the Ray Perception Sensor 3D show a very smooth looking and successful behavior.
Show code cell source
%%capture
if unity_sensor_id == 2:
game_clip3 = make_agent_clip(results_trained, normalize=True).to_html5_video()
# https://stackoverflow.com/questions/55163024/how-to-convert-matplotlib-animation-to-an-html5-video-tag
with open("game_clip3.html", "w") as f:
print(game_clip3, file=f)
Show code cell source
HTML(game_clip3)
Note: A visualization of the Ray Perception Sensor would be certainly interesting here. There is a snippet in the bottom of this notebook were this was started implementing. This requires knowledge on how the features are aligned in the observation vector. However, for the training, the model doesn’t care…
6.2 Using the Camera Sensor#
The visual behavior of the Agent using the Camera Sensor only looks very good as well. Probably a little bit less smooth. Of course it less successfull by score. When watching it for longer, it sometimes looks a little bit “clumsy”. E.g. it sometimes misses a marble when approaching it after a turn. It seems that it acts just directly based on the actual visual perception and it didn’t learn the concept inertia. This could be addressed if the Unity scene would provide more temporal information through stacked images or using the Agent’s actual velocity features (see the function CollectObservations in the script foodCollectorAgent.cs).
Show code cell source
%%time
%%capture
if unity_sensor_id == 0:
game_clip4 = make_agent_clip(results_trained, normalize=True).to_html5_video()
Show code cell output
CPU times: user 58.3 s, sys: 4.04 s, total: 1min 2s
Wall time: 1min 5s
Show code cell source
HTML(game_clip4)
The application the learnt kernels of the first convolutional layer provides an impression which features are probably extracted there. So its probably either walls, marbles, marbles by color, marbles by distance and so on…
Show code cell source
%%time
%%capture
if unity_sensor_id == 0:
weigths_conv1 = agent.qnetwork_local.conv1.weight.data.cpu().clone().numpy()
game_clip5 = make_agent_clip(results_trained, weigths_conv1, normalize=True).to_html5_video()
Show code cell output
CPU times: user 11min 33s, sys: 1min 15s, total: 12min 48s
Wall time: 13min 22s
Show code cell source
HTML(game_clip5)
Show code cell source
# https://stackoverflow.com/questions/55163024/how-to-convert-matplotlib-animation-to-an-html5-video-tag
with open("game_clip4.html", "w") as f:
print(game_clip4, file=f)
with open("game_clip5.html", "w") as f:
print(game_clip5, file=f)
Show code cell source
%%capture
fig = plt.figure(figsize=(9,4))
weigths_conv1 = agent.qnetwork_local.conv1.weight.data.cpu().clone().numpy()
# filtered_images_cv = apply_kernels_to_image(results[25][0][0], weigths_conv1)
visualize_output_func(fig, weigths_conv1)(results[9])
6.3 Using the Camera Sensor and odometric feedback#
This section is a placeholder for an Agent that additionally uses the speed feedback (x and y) from the Unity environment.
Misc & Sandbox#
Some snippets for later usage are left here…
# Visualization of the Ray Perception Sensor 3D
import matplotlib.pyplot as plt
import numpy as np
ray_length = 30
rays_per_direction = 6
max_ray_degrees = 60
# Fixing random state for reproducibility
np.random.seed(19680801)
# Compute pie slices
N = 2*rays_per_direction+1
theta = np.linspace(0.0, max_ray_degrees/180 * 2 * np.pi, N, endpoint=False) - max_ray_degrees / 180 * np.pi
radii = 10 * np.random.rand(N)
width = 0.1*np.pi / 4 # TODO: Change width corresponding to the "Sphere Cast Radius" and the radii (distance)
colors = plt.cm.viridis(radii / 10.)
ax = plt.subplot(projection='polar')
# ax.bar(theta, radii, width=width, bottom=0.0, color=colors, alpha=0.5)
ax.bar(theta, radii, width=width, bottom=0.0, color='orange', alpha=0.5)
plt.show()
import netron
netron.start(file='saved_models/QConvNetwork40.onnx')
netron.start(file='GridFoodCollector2.onnx')
env.close()